说明
在使用Sentry2视觉模块前,请确认源师兄固件版本高于1.3.9。
查看方法:将“源师兄”配备的type-c数据线(非普通手机充电线)连接到电脑或者供电后,屏幕上将会显示版本号1.3.9,如果低于,或者没有显示任何内容,请按照提示升级固件。
概述
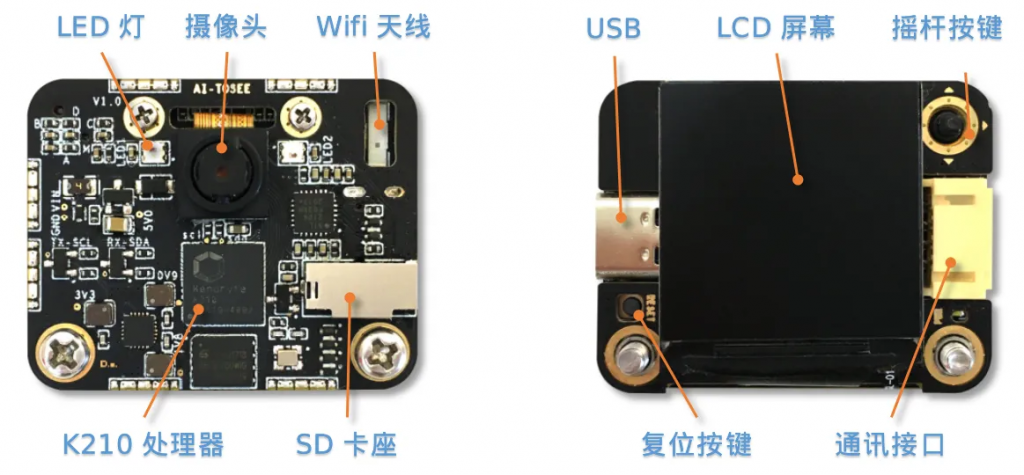
Sentry2AI视觉模块采用先进的64位RISC-V神经网络处理器K210开发设计,集成多种先进的离线视觉处理算法,无需网络即可识别物体,包括颜色识别、人脸识别、机器学习、色块检测、标签识别、交通标志卡片识别、数字识别、物体识别等功能,可以满足中小学人工智能教学的视觉处理需求。
可广泛应用于人工智能、创客、AIoT物联网等教学场景。
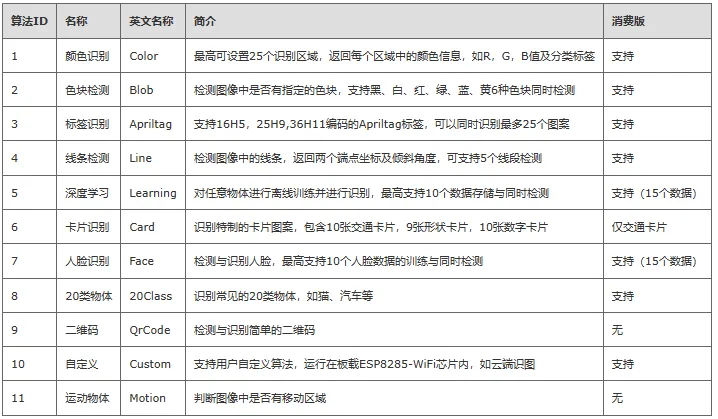
算法列表
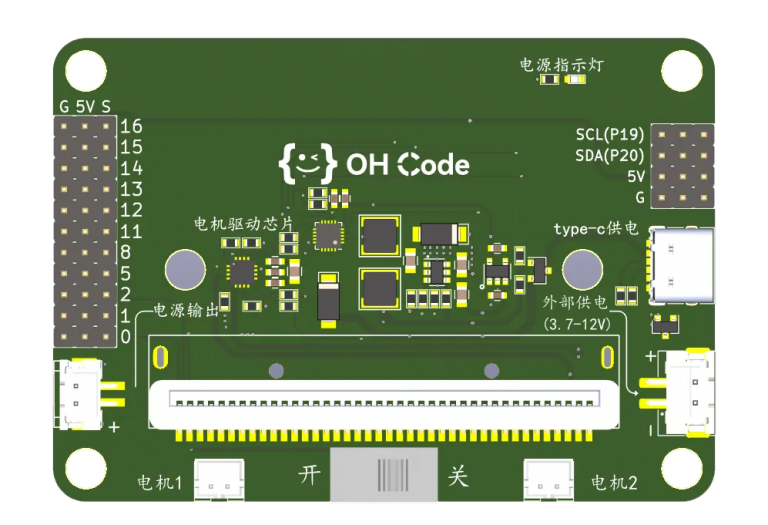
连接方式
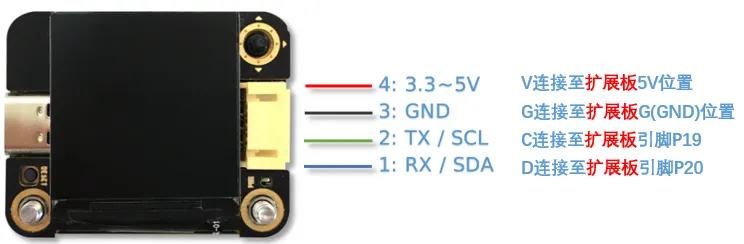
说明:
- 建议将引脚连接至扩展板。
- Sentry2摄像头务必连接至5V电压位置,否则会出现摄像头不稳定的问题,例如:闪动、重启等现象。
- 如果扩展板没有5V电压输出,可以通过摄像头一侧的Type-C供电。切记:Type-C供电时,一点要断开上图中V处连接线与扩展板的电源连接。
UI界面
Sentry2视觉传感器具有2种UI界面:运行界面、设置界面。

运行界面
- 算法状态: 此区域用于显示当前正在运行的算法,也就是程序中启用的算法。
- 图像区域: 显示摄像头的图像
- 显示元素: 对被测物体进行标识,包括检测框、坐标、信息
- 系统状态: 显示当前帧率和当前图像缩放变焦值
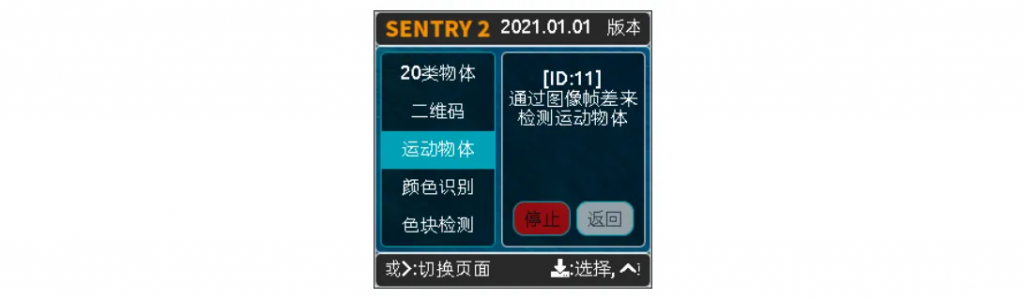
设置界面
- 菜单选项: 上下拨动摇杆来选择不同的菜单,垂直短按摇杆可以进入相应的设置页面
- 版本信息: 此处可以查看固件版本号和固件发布日期
- 简介说明: 对当前菜单进行介绍说明
- 控件按钮: 各种交互按键,用于进行设置操作,不同菜单下的控件是不同的,当导航键移动到某个控件上时会进行高亮显示或蓝边显示
- 操作提示: 当摇杆悬停到不同的控件上时,会显示相应的介绍信息或操作说明,相当于说明书的作用
设置说明
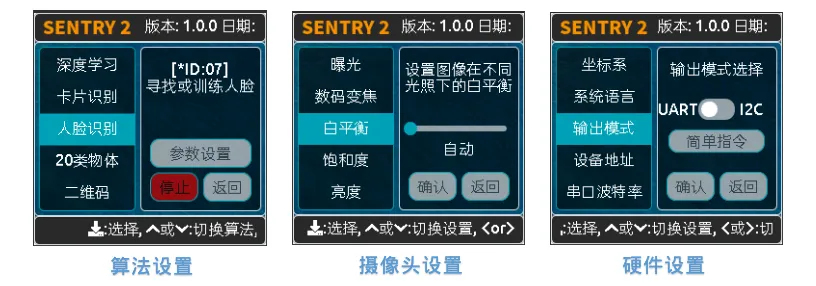
- 运行界面往右拨动摇杆可以进入UI设置界面,UI设置共有三个页面:算法设置、摄像头设置、硬件设置
- 依次往左拨动摇杆则会逐次退出页面,直至返回运行界面
- 算法设置: 可以开启或关闭算法,配置算法参数
- 摄像头设置: 用于调整摄像头的参数,可以对图像进行缩放、白平衡、饱和度、亮度、对比度等参数进行精细调节,需要具备一定的摄像头调参基础,适用于高阶玩家
- 硬件设置: 用于配置通讯方式、波特率、设备地址、灯光颜色、语言等参数,以适配不同的使用模式
摇杆按键功能定义
| 当前模式 | 操作方式 | 动作含义 |
| 运行模式 | 向上拨动 | 切换上个算法 |
| 运行模式 | 向下拨动 | 切换下个算法 |
| 运行模式 | 向左拨动 | 拍照(当插入SD时) |
| 运行模式 | 向右拨动 | 进入GUI设置模式 |
| 运行模式 | 垂直短按 | 保存当前模型(部分算法有效) |
| 运行模式 | 向上长按 | 放大镜头焦距Zoom |
| 运行模式 | 向下长按 | 缩小镜头焦距Zoom |
| 运行模式 | 向左长按 | 关闭/开启屏幕 |
| 运行模式 | 垂直长按 | 删除所有保存的模型(部分算法有效) |
| … | ||
| 设置模式 | 向上拨动 | 切换上一个菜单或控件 |
| 设置模式 | 向下拨动 | 切换下一个菜单或控件 |
| 设置模式 | 向左拨动 | 切换上一个设置界面/返回运行模式 |
| 设置模式 | 向右拨动 | 切换下一个设置界面 |
| 设置模式 | 垂直短按 | 进入控件进行参数设置 |
| … | ||
| 开机时 | 向上长按10秒 | 重置传感器 |
| 开机时 | 垂直长按 | 进入固件烧录模式 |
提示:
拨动即为短按,长按需要至少为2秒以上的保持时间后再松开
设置通讯方式

- 在运行界面往右拨动3次摇杆,进入硬件设置界面。
- 在“输出模式”选项上,压按摇杆进入设置。
- 选择”I2C“模式,点击”确认“返回到菜单栏。
- 往下拨动摇杆,切换到”设备地址“菜单。
- 查看设备地址,此地址应与主控代码中的保持一致,压按摇杆可以进入设置,地址可设置为”0x60~0x63“, 需与编写程序时选择的地址一直,默认0x60即可,点击”确认“并返回。

- 10.往左拨动3次摇杆,返回至运行界面
设置运行界面显示元素
进行图像识别时,为了便于观察检测结果,需要对识别结果进行标识,Sentry2定义了3种标识元素:识别框、坐标、信息,可以更具情况确定是否先显示再屏幕上。
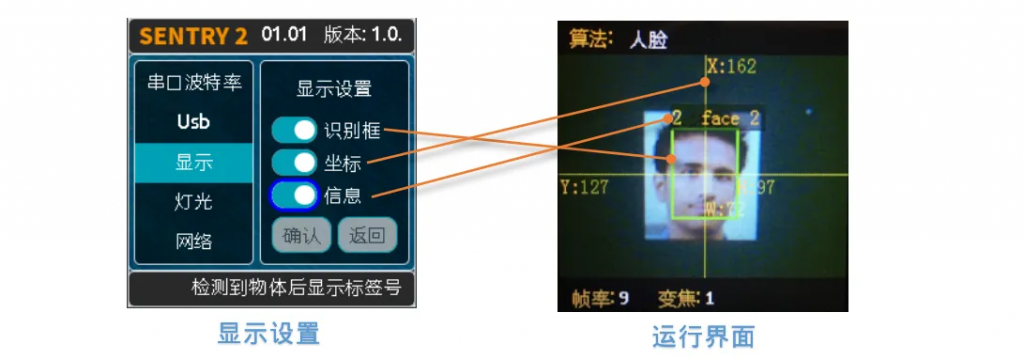
识别框: 显示被测物体的轮廓范围,为一个矩形的方框,其大小为物体的宽和高,位置由物体的中心坐标来确定。
坐标: 在图像中绘制出被测物体的水平和垂直坐标线,并显示其数值,X:水平位置,Y:垂直位置,W:物体宽度,H:物体高度
信息: 显示物体的分类标签、名称内容等信息。
提示:
- 当进行多结果检测时,绘制太多的元素可能会降低图像检测帧率,可适当关闭部分元素绘制功能;
- 有些算法并不具备所有的绘制元素,比如“线条检测”不会绘制坐标线;
- 当图像中没有显示任何检测结果时,可能是显示功能全部被关闭了,需要打开相关的功能即可。
设置LED灯光颜色
进行图像识别时,可以通过传感器前面的LED灯光来指示检测结果,每检测一帧图像,会闪烁一次灯光,灯光颜色和亮度可以进行自定义设置。
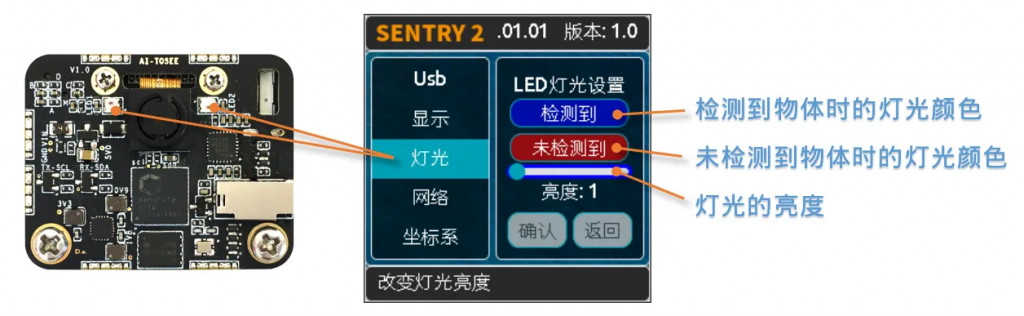
用户可以分别设置“检测到”物体时的灯光颜色和“未检测到”时的灯光颜色,每按一次控件,将会改变一个颜色,切换顺序如下:

其中,黑色代表关闭灯光
当“检测到”和“未检测到”颜色相同时,LED灯光将保持常亮,不再闪烁。
亮度调节范围为0~15,其中0为关闭灯光,15为最亮,如果只作为一般性指示功能,亮度设为1或2即可
关闭灯光
在某些情况下,灯光可能会对图像识别产生干扰(如颜色类算法,近距离物体识别时,等),此时需要关闭灯光,有两种方式可以关闭的灯光:
1.将“检测到”和“未检测到”设置为黑色;
2..将亮度设置为0。
补光灯功能
当环境较暗时,或者处于逆光环境情况下,需要开启补光灯来照明,可以按照下面的方式设置:
1.将“检测到”和“未检测到”都设为白色,此时LED灯光将保持白色常亮状态,不再闪烁;
2.将亮度提高,比如设为最大15,此时发光最亮。
设置坐标系
Sentry2支持2种坐标系:绝对值坐标系、百分比坐标系。

绝对值坐标系: 返回图像中的实际坐标数据,与图像分辨率一致,水平方向范围“0~319”,垂直方向范围“0~239”,图像中心点坐标为(160,120),该模式具有更高的精确度。
百分比坐标系: 将实际检测到的坐标结果量化至整幅图像“0~100”的范围区间内,返回其相对值坐标,水平X方向和垂直Y方向范围“0~100”,图像中心点坐标为(50,50)。
摄像头设置
数码变焦
- 当需要看清远处的物体时,可以对图像进行放大或缩小,支持1~5档调节;
- 增大缩放值会让物体放大,但视野会变小,看到的东西会变少;
- 减小缩放值会让物体缩小,但视野会变大,可以看到更多的东西;
- 除了UI控件可以设置缩放值外,还支持导航快捷键来设置
- 向上长按:放大
- 向下长按:缩小
白平衡
在不同光照下(白光和黄光),白色会有一定的偏差,从而导致其他颜色的正常显示,此时需要设置白平衡来进行调节,一共有4种模式:自动、锁定、白光、黄光
自动: 此为默认模式,适用于通用场景
锁定: 当图像中存在大面积单色背景时,比如近距离识别颜色时,会导致图像发生偏色问题,将导致颜色识别出错,因此在识别之前需要进行白平衡的锁定,避免颜色自动调节,方法如下:
1.在相同的灯光环境下,将摄像头面向白纸,保持约20cm的距离;
2.进入“白平衡”设置页面,选择“锁定”模式;
3.点击“确认”,此时摄像头会记录下当前参数值,不再自动调整;
4.返回运行界面
白光: 白色灯光环境下使用
黄光: 黄色灯光环境下使用
饱和度
增大饱和度会让色彩变得鲜艳,色彩会被强化与突出,进行颜色检测和识别时,可以适当增大饱和度,减小饱和度会让色彩变得黯淡,很低时则类似于黑白画面。
亮度
图像过暗时可以适当提高亮度,但如果在较亮的环境下提高,则图像会变得灰白,如蒙了一层雾气一般,当面对电脑屏幕等光源时,可以适当减小亮度。
对比度
增大对比度会让相邻有色差的地方区分度更高,当进行黑白线条或二维码图案识别时,可以适当提高对比度,减小对比度会让图像看起来黯淡。
锐化
增大锐化会让边缘轮廓更清晰,细节更明显,但过高会产生噪点,减小锐化图像会变得模糊。
曝光
光线较强导致图像曝光时可以减小曝光值,反之如果环境较暗则可以增大曝光值。
旋转镜头
开启后镜头画面将旋转180度。
常用编程代码块说明
仅介绍常用代码块的功能及使用方法。
初始化
首先初始化摄像头,选择对应的I2C地址,与设置通。

启动算法

设定采集点
采集范围指的是有效的区域。

索引:指的是识别后,采集到内容的序号,获取数据时需要使用此序号,不能重复。
也可以通过系统设置,而不采用代码块设置采集点。
以颜色识别为例,通过菜单,选择颜色识别->参数,选择网格数和大小,每一个网格代码一个检测位置,每个检测位置称为一个识别区域,也是一个索引,从左到右、从上到下从1开始计数,其位置和大小由用户进行设置,最多25组识别区域,返回该区域的颜色标签信息和实际的红R、绿G、蓝B数值。
设置采集点参数

用户需要指定识别区域的坐标和大小,最多可设置25个识别区域,如果没有指定,则默认为图像中心点。分别为横向坐标、纵向坐标、宽度、高度、空。
具体请参考“算法”中每个算法的配置参数。
检测到的数量

检测到的数量指的是识别到结果总数量,此代码块通常放置于重复执行中。
检测到的结果

指的是检测到数量中每个索引的结果,如果检测到3个有效位置,索引分别为1、2、3,可以选择对应索引返回的结果类型,包括横向坐标、纵向坐标、宽度、高度、标签,其中不同的算法,标签结果是不一样的。具体参考算法。
其它代码块的使用,请参考算法。
算法
颜色识别
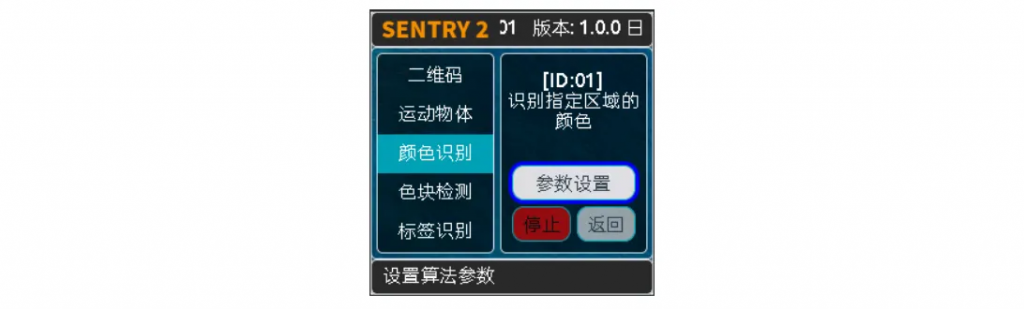
用户指定一个或多个识别区域,识别该区域的颜色分类。每个检测位置称为一个识别区域,其位置和大小由用户进行设置,最多25组识别区域,返回该区域的颜色标签信息和实际的红R、绿G、蓝B数值。
注意: 由于紫色、青色(蓝绿色)、橙色、灰色等,相对来说容易造成误报,因此这几个颜色部分区间被划分为临近颜色的标签,部分被划分为未知颜色,如果用户确实有这几种颜色的使用需求,可以通过返回参数的R、G、B实际值自行计算与判断
配置参数
用户需要指定识别区域的坐标和大小,最多可设置25个识别区域,如果没有指定,则默认为图像中心点当通过主控设置寄存器参数时,每个识别区域都需要设置以下参数:
| 参数 | 含义 |
| 1 | 识别区域中心x坐标 |
| 2 | 识别区域中心y坐标 |
| 3 | 识别区域宽度w |
| 4 | 识别区域高度h |
| 5 | 无 |
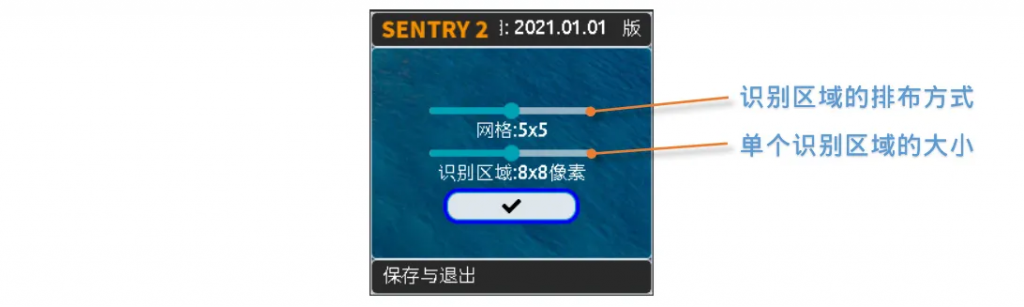
在UI设置页面中,有几种预置的识别区域网格分布形式和识别区域大小:
网格(水平方向数量 x 垂直方向数量):1×1、2×2、3×3、4×4、5×5、1×10、2×10、6×1、6×2
识别区域大小(水平方向像素 x 垂直方向像素):2×2、4×4、8×8、16×16、32×32
注意: 百分比坐标系下想表示一个正方形,其宽w和高h是不相等的,而是符合3:4的关系。比如,如果正方形的宽w为12%,那么其对应的高度h应该为12/3×4=16%
百分比坐标系下,预设的识别区域大小(水平方向百分比 x 垂直方向百分比):1×1、2×3、3×4、6×8、9×12
返回结果
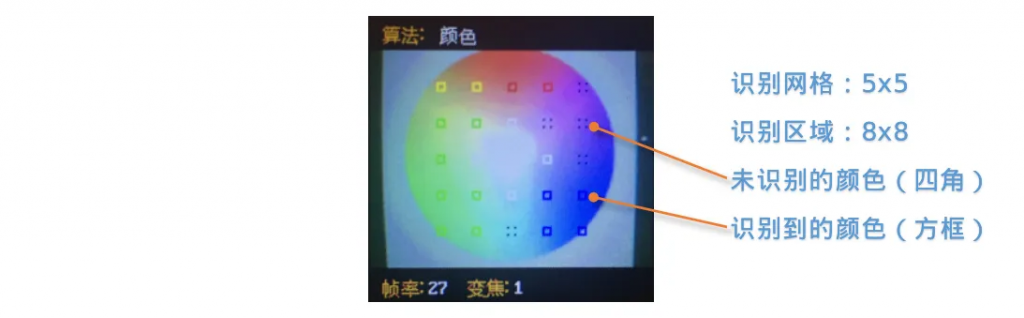
识别到颜色后,UI界面上的识别区域将会变为其对应颜色的方框,如果是未知颜色,则会显示一个四角框
当通过主控读取寄存器时,将会返回以下的数据:
颜色识别每个采集点(索引)返回的结果
| 结果 | 含义 |
| 1 | R,红色值,范围 0~255 |
| 2 | G,绿色值,范围 0~255 |
| 3 | B,蓝色值,范围 0~255 |
| 4 | 无 |
| 5 | 颜色分类标签 |
颜色识别标签说明
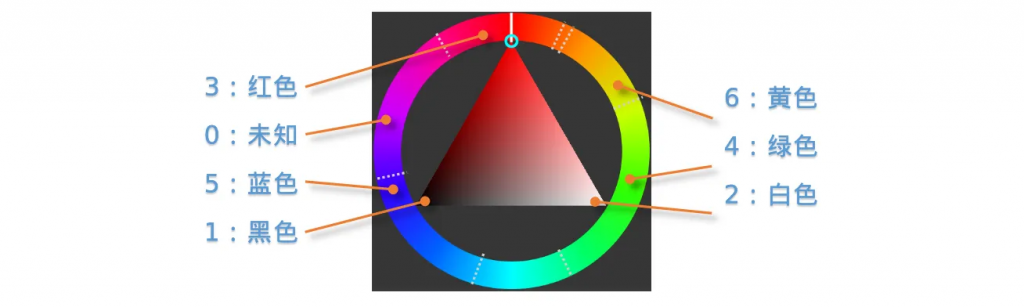
| 分类标签 | 英文标识 | 中文含义 | 分类标签 | 英文标识 | 中文含义 |
| 1 | Black | 黑色 | 2 | White | 白色 |
| 3 | Red | 红色 | 4 | Green | 绿色 |
| 5 | Blue | 蓝色 | 6 | Yellow | 黄色 |
| 0 | Unknown | 未知 |
使用技巧
- 由于是对像素进行统计处理,当识别区域较多且较大时,处理速度会相应的变慢,反之则会比较快速。
- 当识别区域窗口较小时(比如2×2),可以识别较小的色块,处理速度快,但统计样本太少,容易被干扰,可信度较低,适合于背景单一可控的环境。
- 当识别区域窗口较大时(比如32×32),统计样本多,即便出现若干的杂色也会被滤除,具有较高的可信度,但处理速度会变慢,当识别区域处于2种颜色的边界时,颜色可能会经常跳变。
- 当画面存在偏色时,需要锁定白平衡功能
色块检测-Blob
用户指定检测一个或多个颜色,判断图像中是否有该颜色的色块,返回其坐标和大小,支持多颜色多色块检测,颜色分类标签与颜色识别中的定义相同。
配置参数
用户需要指定待检测的颜色标签,最多可同时开启全部6种颜色检测,但速度会有所下降。用户还可以通过设置色块的最小宽度w和高度h来过滤那些小于该值的色块,以减少误报。
当通过主控设置寄存器时,有以下参数需要设置:
| 参数 | 含义 |
| 1 | 无 |
| 2 | 无 |
| 3 | 有效色块最小宽度w |
| 4 | 有效色块最小高度h |
| 5 | 待检测的颜色分类标签 |
色块检测设置

在UI界面中,有几种预置的参数可以使用:
算法性能
根据不同的应用需求来选择合适能算法性能,有3个选项可以设置,分别为“灵敏”、“均衡”、“准确”
在灵敏模式下识别速度快,帧率高。准确模式下可以检测远处的色块,但速度会降低。默认为均衡性能
同时检测的最大数量:
单个颜色的最大检测数量支持1~5个的输出
当设置为1时,只返回一个最优结果,如果图像中有多个色块,则返回最大的那个,如果大小相近,则优先返回左上角的那个
当设置大于1时,返回色块的数量不会超过这个值。
最小色块的区域大小:
如果背景中存在相同颜色的小色块,可以通过合理的设置最小值实现过滤功能
绝对值坐标系下的预设值为:2×2、4×4、8×8、16×16、32×32、64×64、128×128像素
百分比坐标系下的预设值为:1×1、2×3、3×4、6×8、9×12、21×28、42×56 %
待检测的颜色:
以按键形式提供用户选择,开启某个颜色后会显示一个小眼睛图标,未开启的颜色则会显示一个带斜杠的眼睛图标,可以同时开启一个或多种颜色
返回结果
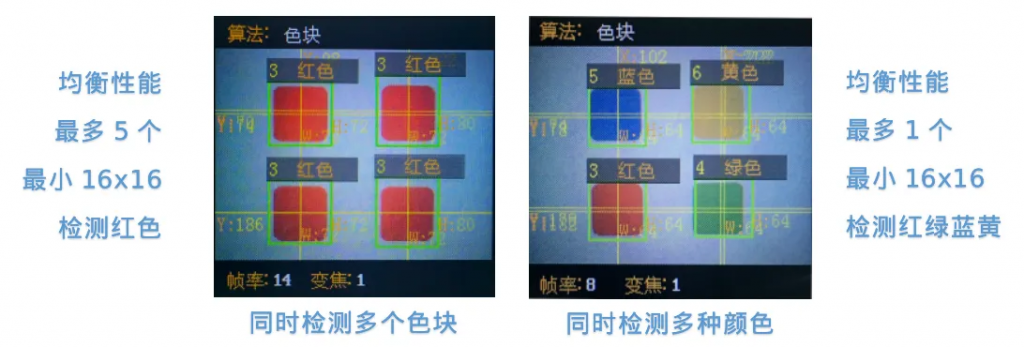
识别到指定色块后会在UI界面上进行标识,显示其位置、大小、分类标签、名称等信息
当通过主控读取寄存器时,将会返回以下的数据:
| 结果 | 含义 |
| 1 | 色块中心x坐标 |
| 2 | 色块中心y坐标 |
| 3 | 色块宽度w |
| 4 | 色块高度h |
| 5 | 颜色分类标签 |
使用技巧
- 当确定需要跟踪一个物体时,比如检测白色的道路或是跟踪小球,可以将色块数量设置为1,可以提高速度,减少误报
- 采用较小的识别区域并使用准确性能模式,可以看到更远处的物体
- 识别大面积的色块时,运行帧率会明显下降,此时可以用灵敏模式
- 当画面存在偏色时,需要锁定白平衡功能
标签识别-Apriltag

判断图像中是否有Apriltag标签图案,目前支持16H5,25H9,36H11的编码形式,算法运行时需要先指定用哪一种解码方式,不同的编码形式不可以同时检测,但同一种编码可同时检测25个标签。

默认为使用36H11编码,可通过设置配置参数。
apriltag标签为一组已经定义好的黑白方块图案,不同的编码形式使用的方块数量是不同的。每个图案都有一个预定义的分类标签值,识别后会返回该值。
Apriltag图案下载:https://github.com/AprilRobotics/apriltag-imgs/tree/master
配置参数

UI界面中可以设置算法性能和编码形式
算法性能:
根据不同的应用需求来选择合适能算法性能,有3个选项可以设置,分别为“灵敏”、“均衡”、“准确”
在灵敏模式下识别速度快,帧率高。准确模式下可以检测远处的标签,但速度会降低。默认为均衡性能
编码形式:
当点击按钮时,会循环切换“16H5”,“25H9”,“36H11”三种编码模式,切换后需要重启算法,下次启动时生效。
返回结果
| 结果 | 含义 |
| 1 | 标签中心x坐标 |
| 2 | 标签中心y坐标 |
| 3 | 标签宽度w |
| 4 | 标签高度h |
| 5 | 标签编号 |
使用技巧
- 所识别到的标签宽度和高度具有较稳定的输出,可以利用这一点进行距离判断,标签旋转后不会改变其大小,但倾斜时可能会有影响
- 当需要识别多个标签时,可以关闭坐标线的显示,看起来比较简洁
- 标签越大,识别的距离就越远
人脸识别

检测图像中是否含有人脸,可以通过按键对人脸进行学习训练,当再次检测到该人脸时,返回一个分类标签用于区分是哪个人脸。
配置参数
训练新的人脸:
在运行界面可以训练新的人脸,操作方法如下:
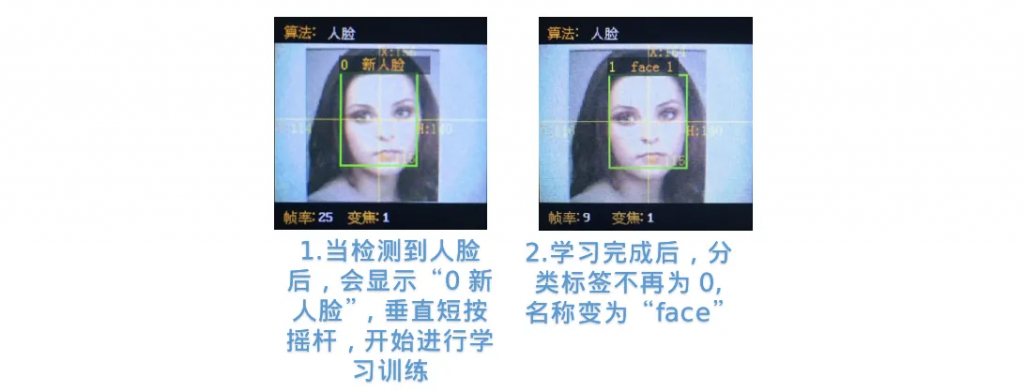
新训练的人脸会自动分配标签值,分配原则是:选择当前可用ID号中最小的那个序号
删除所有人脸:
在运行界面中,垂直长按摇杆2秒以上,可以删除所有模型数据
当通过主控设置寄存器时,可以将参数5写入0来删除对应的模型文件。
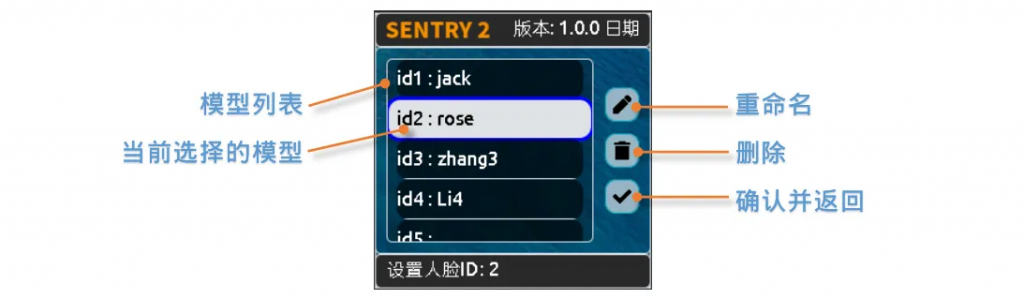
在UI界面中,可以对已训练的模型进行重命名或删除操作,操作方法可参考:机器学习。
注意:设置名称只用于帮助用户记忆和理解,但主控设备并不能读取该名称
返回结果

该算法支持人脸检测(未训练的人脸)和人脸识别(已训练的人脸)同时运行,检测到未训练的人脸时会显示标签为0,名称为“新人脸”,当检测到已训练的人脸时,会显示相应的标签和存储的名称
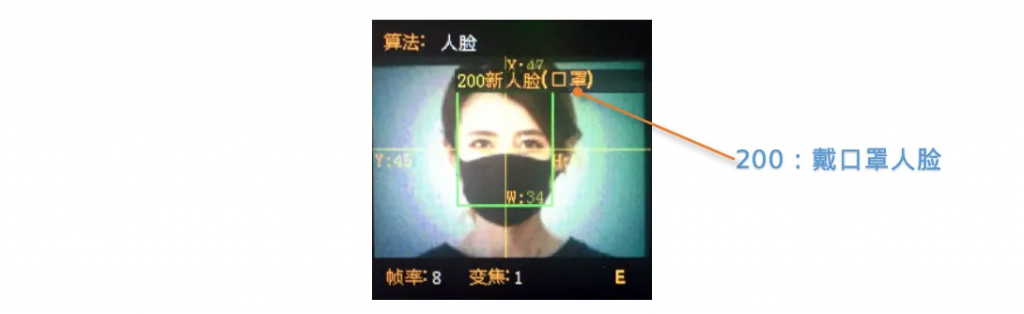
特殊的,如果检测到戴口罩的新人脸,会显示“新人脸(口罩)”
当通过主控读取寄存器时,将会返回以下的数据:
| 结果 | 含义 |
| 1 | 人脸中心x坐标 |
| 2 | 人脸中心y坐标 |
| 3 | 人脸宽度w |
| 4 | 人脸高度h |
| 5 | 人脸分类标签 |
机器学习

可以对任意物体进行离线学习并识别,目前支持存储10个物体,用户可以对已训练的模型进行重命名,删除操作。
配置参数
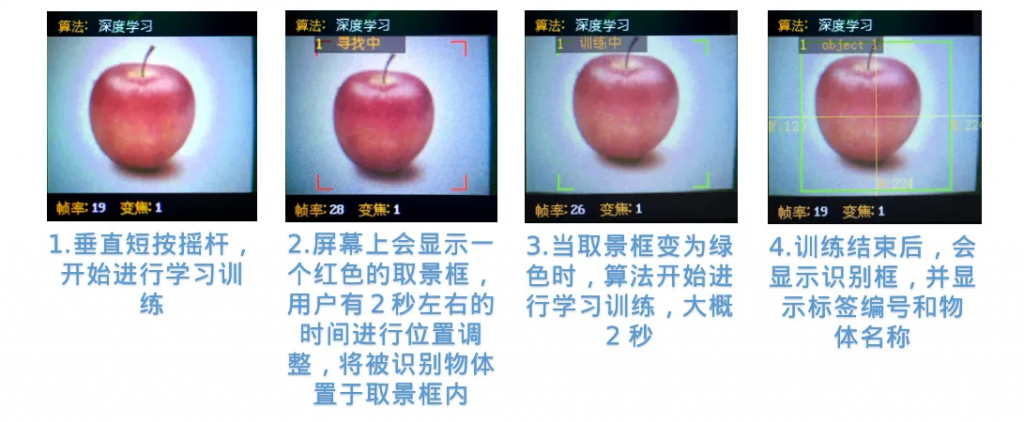
训练新的物体:
在运行界面可以训练新的物体,操作方法如下:

新训练物体会自动分配标签值,分配原则是:选择当前可用ID号中最小的那个序号
删除所有模型:
在运行界面中,垂直长按摇杆2秒以上,可以删除所有模型数据
当通过主控设置寄存器时,可以将参数5写入0来删除对应的模型文件:
| 参数 | 含义 |
| 1 | 无 |
| 2 | 无 |
| 3 | 无 |
| 4 | 无 |
| 5 | 如果当前Param-ID已经存在,写入0后可以删除对应的模型数据 |
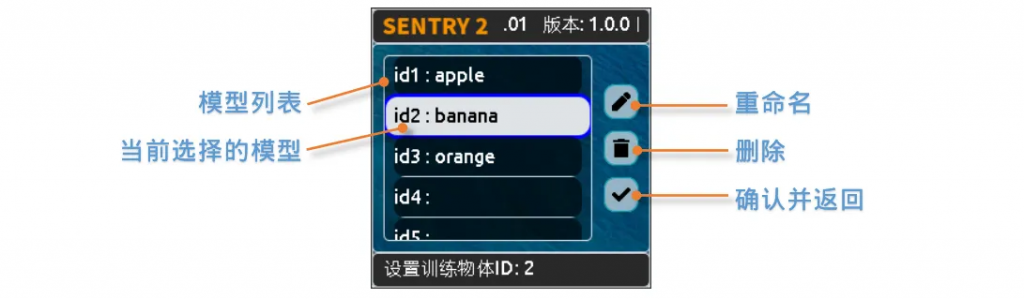
在UI界面中,可以对已训练的模型进行重命名或删除操作
对模型重命名:
在UI界面中可以对已训练的物体进行重命名,操作方法如下:
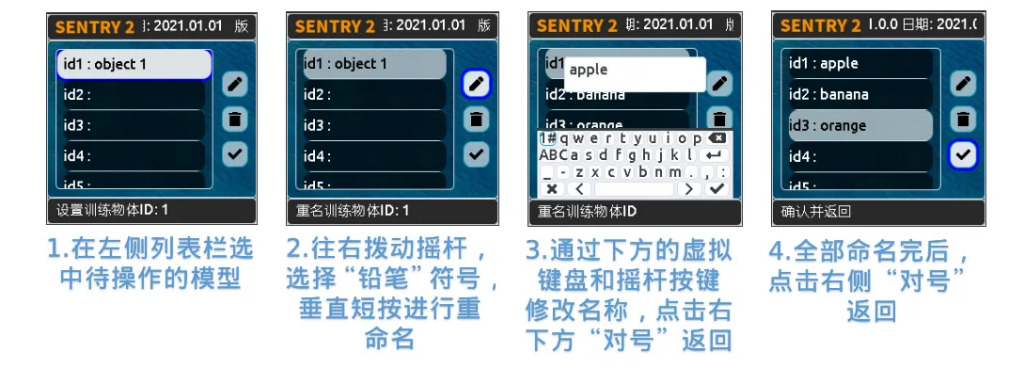
注意:只支持英文的命名方式,不支持其他语言
注意:名称最大支持32个字符,建议不要太长
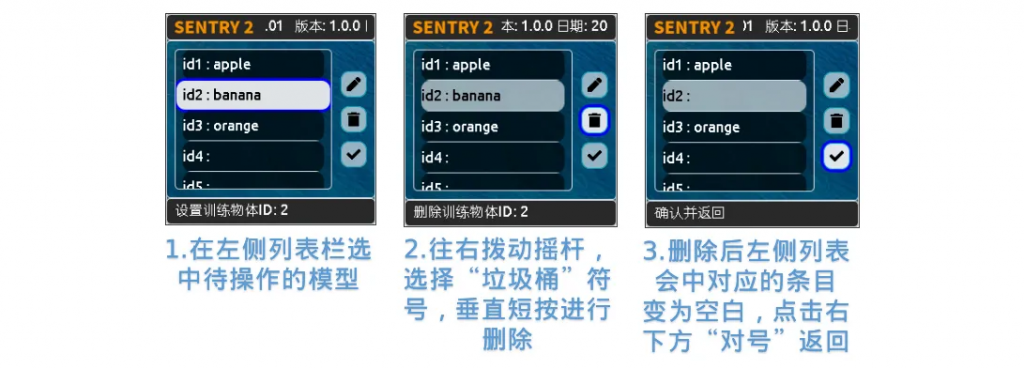
删除单个模型:
在UI界面中可以删除单个模型数据,操作方法如下:
返回结果
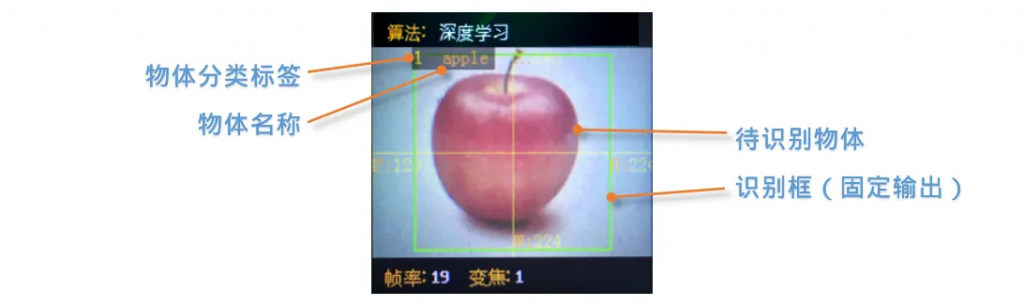
该算法只支持判断被训练物体是否存在,而不判断其坐标方位等信息,所以识别框为一个固定输出值
当通过主控读取寄存器时,将会返回以下的数据:
| 结果 | 含义 |
| 1 | 固定值,160 |
| 2 | 固定值,120 |
| 3 | 固定值,224 |
| 4 | 固定值,224 |
| 5 | 训练物体的ID号 |
卡片识别
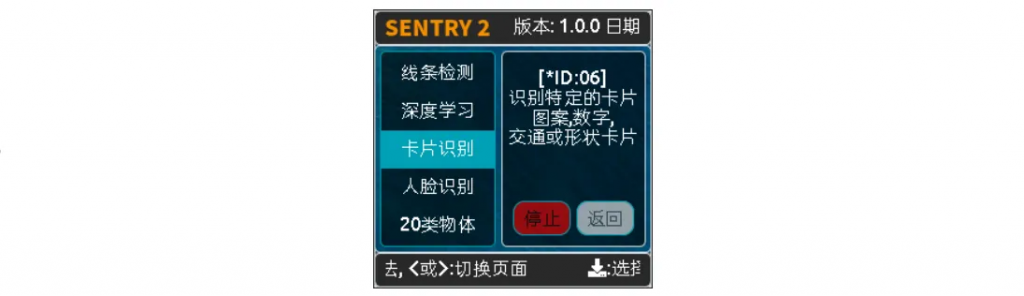
识别图像中是否有指定的卡片图案,返回其卡片坐标、大小、分类标签等信息。包括交通标志类,图形符号类,数字类,其分类标签见下表
交通标志
| 分类标签 | 英文标识 | 中文含义 | 分类标签 | 英文标识 | 中文含义 |
| 1 | Forward | 前进 | 2 | Left | 左转 |
| 3 | Right | 右转 | 4 | Turn Around | 掉头 |
| 5 | Park | 停车 | 6 | Green | 绿灯 |
| 7 | Red | 红灯 | 8 | Speed 40 | 限速40 |
| 9 | Speed 60 | 限速60 | 10 | Speed 80 | 限速80 |
图形符号
| 分类标签 | 英文标识 | 中文含义 | 分类标签 | 英文标识 | 中文含义 |
| 11 | Check | 对号 | 12 | Cross | 叉号 |
| 13 | Circle | 圆形 | 14 | Square | 方形 |
| 15 | Triangle | 三角形 | 16 | Plus | 加号 |
| 17 | Minus | 减号 | 18 | Divide | 除号 |
| 19 | Equal | 等于号 |
数字
| 分类标签 | 英文标识 | 中文含义 | 分类标签 | 英文标识 | 中文含义 |
| 20 | Num 0 | 数字0 | 21 | Num 1 | 数字1 |
| 22 | Num 2 | 数字2 | 23 | Num 3 | 数字3 |
| 24 | Num 4 | 数字4 | 25 | Num 5 | 数字5 |
| 26 | Num 6 | 数字6 | 27 | Num 7 | 数字7 |
| 28 | Num 8 | 数字8 | 29 | Num 9 | 数字9 |
返回结果
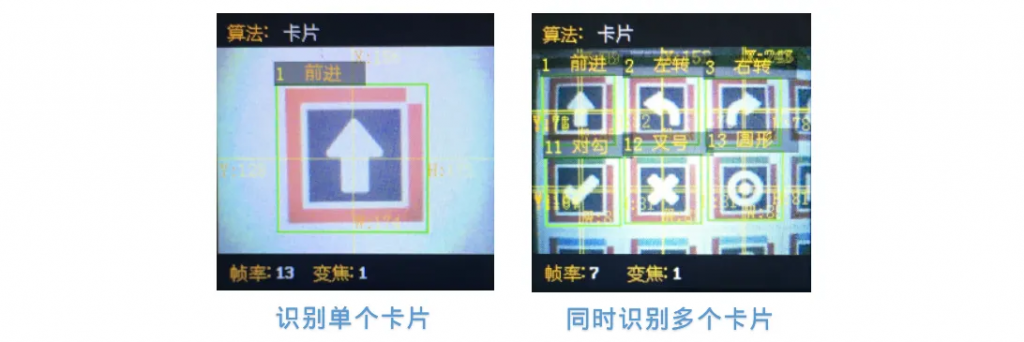
该算法支持多张卡片同时识别,卡片在30度以内的旋转仍然可以识别,角度旋转过大则无法识别
当通过主控读取寄存器时,将会返回以下的数据:
| 结果 | 含义 |
| 1 | 卡片中心x坐标 |
| 2 | 卡片中心y坐标 |
| 3 | 卡片宽度w |
| 4 | 卡片高度h |
| 5 | 卡片分类标签 |
使用技巧
- 该算法可以检测到远距离的卡片,但此时并不是用户所期望的检测位置,此时可以通过判断“卡片宽度”来排除那些远距离的卡片,比如只有当卡片宽度>50%时,才会触发接下来的动作行为
- 图像中有多个卡片时,比如拍成一排的卡片,其检测输出顺序以卡片中心点为基准,从左上角(0,0)点逐行扫描,自上而下,从左到右,的顺序输出
20类物体识别
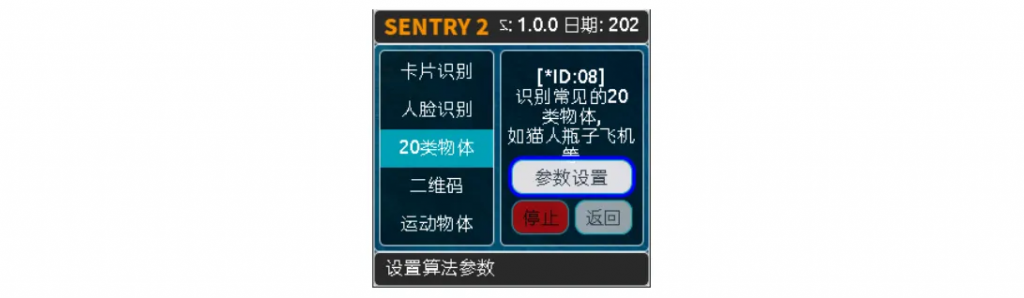
识别常见的20类物体,返回他们的坐标信息和分类标签,详见下表。
图形符号类
| 分类标签 | 英文标识 | 中文含义 | 分类标签 | 英文标识 | 中文含义 |
| 1 | Airplane | 飞机 | 2 | Bicycle | 自行车 |
| 3 | Bird | 鸟 | 4 | Boat | 船 |
| 5 | Bottle | 瓶子 | 6 | Bus | 公交车 |
| 7 | Car | 小汽车 | 8 | Cat | 猫 |
| 9 | Chair | 椅子 | 10 | Cow | 牛 |
| 11 | DiningTable | 餐桌 | 12 | Dog | 狗 |
| 13 | Horse | 马 | 14 | Motorbike | 摩托车 |
| 15 | Person | 人 | 16 | PottedPlant | 盆栽植物 |
| 17 | Sheep | 羊 | 18 | Sofa | 沙发 |
| 19 | Train | 火车 | 20 | Tvmonitor | 电视 |
配置参数

UI界面中可以设置算法性能
算法性能:
根据不同的应用需求来选择合适能算法性能,有3个选项可以设置,分别为“灵敏”、“均衡”、“准确”
灵敏模式下会更容易识别到物体,但可能误报较高,准确模式下会相对减少误报,默认为均衡模式
返回结果

当通过主控读取寄存器时,将会返回以下的数据:
| 结果 | 含义 |
| 1 | 物体中心x坐标 |
| 2 | 物体中心y坐标 |
| 3 | 物体宽度w |
| 4 | 物体高度h |
| 5 | 物体分类标签 |
使用技巧
- 图像清晰度会较为明显的影响到识别效果,如果图案太小,摄像头无法清晰对焦到图案上,屏幕中图像看起来比较模糊,那么识别效果会变差,可以使用较大的图片
- 如果直接对电脑屏幕上的图案进行识别,可以适当调低电脑屏幕的亮度,避免过曝。
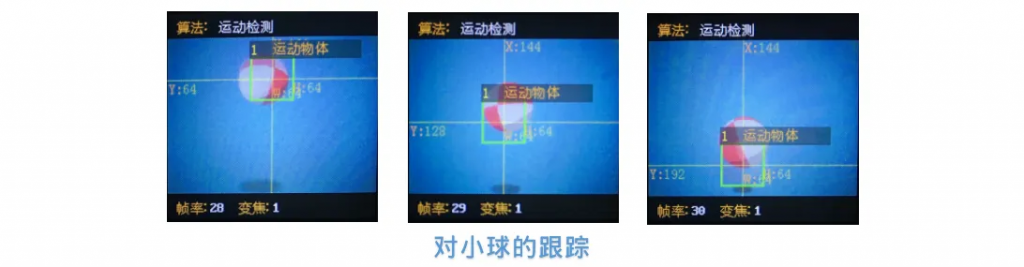
运动物体检测
在摄像头静止状态下,通过对比相邻帧的像素差异,来判断图像中是否有发生变化的区域,如果有则认为该区域有运动物体,返回这个区域的坐标信息。 该算法目前只能返回一个检测结果。
返回结果
当通过主控读取寄存器时,将会返回以下的数据:
| 结果 | 含义 |
| 1 | 运动区域中心x坐标 |
| 2 | 运动区域中心y坐标 |
| 3 | 运动区域宽度w |
| 4 | 运动区域高度h |
| 5 | 无 |
示例代码
检测第一个检测点的颜色标签。代码如下:
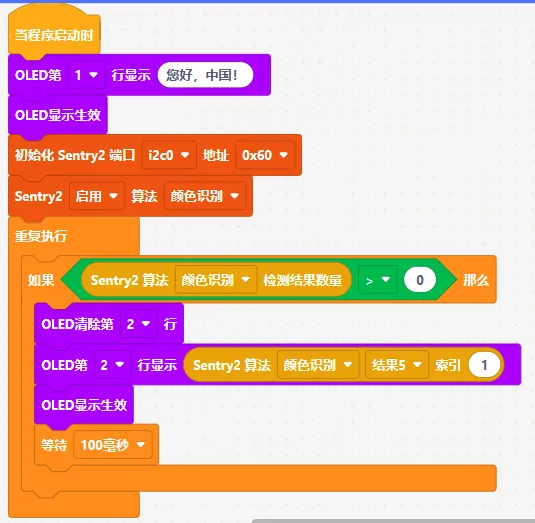
随着摄像头的移动,当第一个检测点落到不同的颜色上,会显示不同的数值,具体参考算法中的“颜色识别”。